
Charging Ox CNC Machine
Discussion in 'CNC Mills/Routers' started by Motions, Jan 10, 2015.
Charging Ox CNC Machine
Discussion in 'CNC Mills/Routers' started by Motions, Jan 10, 2015.
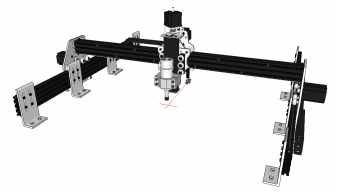
A heavily modified Ox CNC build to replace SO2.
Page 2 of 3
Page 2 of 3