
C-BEAM-GTC
Discussion in 'CNC Mills/Routers' started by GinoTheCop, Mar 9, 2016.
C-BEAM-GTC
Discussion in 'CNC Mills/Routers' started by GinoTheCop, Mar 9, 2016.
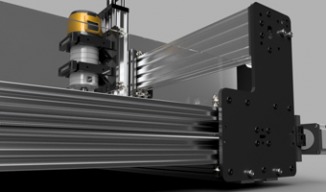
Building a larger C-BEAM CNC Machine with no previous experience.
Page 4 of 6
Page 4 of 6