
Strong OX
Discussion in 'CNC Mills/Routers' started by Hytech2k, Nov 28, 2014.
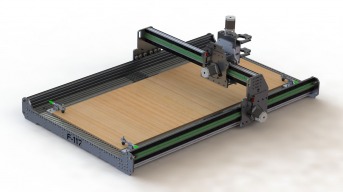
Area 51 CNC Parts F-117 CNC Gear Rack Drive System
Discussion in 'CNC Mills/Routers' started by Hytech2k, Nov 28, 2014.
This is my journey on building a rack and pinion Ox variant called the F-117 CNC.
Page 2 of 12
Page 2 of 12