
A Rolling Plotter
Discussion in 'DrawBot' started by David Bunch, Feb 21, 2020.
A Rolling Plotter
Discussion in 'DrawBot' started by David Bunch, Feb 21, 2020.
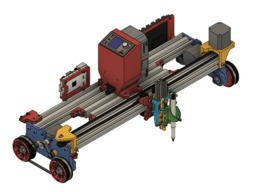
To build a simple plotter that rolls along the length of large paper, foam core or other flat objects.
Page 5 of 7
Page 5 of 7