Yeah, I think a dual Volcano nozzle with a combination of 0.4 and 0.8 nozzles may do nicely. Two nozzles gives me access to the entire bed on the Y axis, and about 410+ mm on the X axis for both nozzles. Also gives me some space to put cooling fans on the back of the carriage... Plus, I can also switch back to a Chimera configuration with the dual v6 nozzles if I want smaller nozzles for detail pieces.
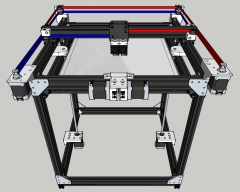
Lookin' pretty sweet! I think you're almost there. I'm not sure how you are going to run your belts above and below the gantry though. I really like how the springs and belt driven Z axis worked out - it has great symmetry and I like how it opens up visibility to the build area. It almost makes me want to swap out my lead screws but I think I am going to go ahead as planned as it is a less complex build that I think will be as robust. I can always change to belts later - I've already checked all my measurements - I wouldn't need to change anything else and I can get all the parts from robotdigg for about $64 (plus shipping). Rostock Mini 492mm Long 8mm Diameter Smooth Rod Pack$16.801$16.80 KFL08 Pillow Block$1.004$4.00 Timing Belt Tensioner Spring$0.204$0.80 Open Ended 6mm Width GT2 Belt$1.804$7.20 Rostock 16 Teeth 5mm Bore GT2 Pulley $1.802$3.60 GT2 Pulley 32 Teeth 8mm Bore$2.102$4.20 GT2 Pulley 20 Teeth 8mm Bore$2.008$16.00 228mm or 232mm long gt2-6 closed-loop belt$0.502$1.00 200-2GT-6 endless belt$0.402$0.80 LM8UU Linear Bearing$0.604$2.40 KP08 Pillow Block$1.008$8.00
The X/Y motors will be mounted to the top front rail, one with its pulley above the bar and the other upside down, pulley below the bar. Should be plenty of clearance for the belts.
I saw that. I just wasn't sure where the belts were going to be routed as the Z axis belts and constant force springs seemed to be in the way of where you would need to route belts for the lower gantry belts.
Yeah, good point. I'll make it fit, I only need about 10-15mm of clearance width for the belts to pass through.
I like these KFL08 Pillow Block mounts - I was going to use a printed part to hold a 608 bearing, but I think these will be better. Now to find the dimensions so I can make a model of one... Bingo:
Rotated the bearing blocks by 33.226 degrees to have the two holes line up for a 20mm distance, and set them to the middle of the 20x40 vertical beams. The top and bottom bearings are rotated in this way to give the Z axis wheels more vertical room to travel. With an E3D Chimera w/v6 hot ends, it makes for just over 440 mm of vertical room - 430 mm if I use the longer Volcano hot ends (they're 10mm longer). Plus, there's enough room on the back of the hotend carriage for a 5015 blower fan. I'm also going to squeeze in an inductive proximity sensor for the Z-probe/Endstop.
So the giant sheet of PEI arrived today - 24" x 24", with one side slightly textured, and the other side smooth with a peel-off protector. It's only about 1mm thick, but relatively stiff by itself. I'll see if the aluminum plate is flat enough (on order), and if so I'll apply it smooth side up with adhesion tape. The springs also arrived - pretty strong!
I'll be interested in how well this works for you if you beat me to my build. I may add a glass layer anyway for added flatness and reduced thermal expansion. There is a glass place not far from my office that sells fireplace glass for $17 a sq. ft. We had a piece cut for the Replicator 2X in at my workplace and it worked like a charm.
I've done a couple belt driven z-axis builds and I've found keeping good belt tension is paramount to proper performance. I've also implemented fishing weights as counter weights on my Ord Bot z-axis conversion: The heavier the z-axis, the harder it will be to set good tension. The springs are probably a good solution to this.
How heavy would you say is too heavy? What weight is optimum? Is 'weightless' actually desired? Do you think my current lead screw config would be less problematic (http://www.openbuilds.com/threads/h-bot-corexy-cube-with-fixed-build-plate.1528/#post-15495)? I haven't competed an order for a belt option yet...
I think your leadscrew configuration may be easier to setup and maintain in my opinion. With that said, I do like the belt design by Giuliano. What's an optimum weight is a great question. I would say the lightest you can get away with if using belts. I'll use a machine I designed for reference I called the "Slot Bot". My bed size was 20" x 20" and it was heavy! I'd say it was pushing 10 lbs with the plywood, LM16UU bearings, 1/8" aluminum plate, etc. I used two geared steppers on opposing sides to lift it. Getting it setup correctly was a pain. Every time I got it right, belt on other side would loosen and I'd start over. In hindsight, the belt I was using probably not rated for it. Here are a couple pics: I didn't have a functional tensioning mechanism, so that may have been a large part of my problem.
My bed will be heavier, with all that aluminum - 8 pounds for the 1/4" thick MIC6 aluminum, and 4 pounds for the 20x40 carriage assembly. 12 pounds worth... However, with 4 x 3.5 pound springs, I should have about 14 pounds of lift, resulting in a positive balance - the bed will want to go to the top when power is removed. So my belts will be tensioned against the upwards pull of about 2 pounds, possibly less.. I'm also using a combination of more powerful 60mm motors and a 2:1 belt drive reduction to increase the torque. The one issue I'm working on resolving now is the belts - at the center distances I have, the next available endless belt is about 1140mm - 30mm too long: http://www.robotdigg.com/product/270/1140-2gt-6-2gt-endless-belt So I would have to take up about 30mm of slack for the belts to be at the right length. Also I would rather use an endless belt rather than a cut length of belt because the endless belt would be stronger - no breaks in the belt to clamp together. At least, in theory...
I've found this timing belt calculator to be really useful: http://www.bbman.com/catalog/belt-length-calculator.html However, since RobotDigg doesn't have belt lengths in every conceivable configuration I'm running into situations where the desired belt may be too long, or too short... Edit: A center distance of 523.0 mm gets me a belt that needs to be 1110mm long - and SDP/SI has them: http://www.sdp-si.com/eStore/Catalog/PartNumber/A 6R51M555060 About $10 each, so they're not cheap... but they're bound to be well made.
Have you seen this (http://www.openbuilds.com/threads/h-bot-corexy-cube-with-fixed-build-plate.1528/#post-15733)? One less thing on the gantry and phenomenal accuracy and repeat-ability. I ordered the parts from sparkfun - about $20. More than an inductive probe but can't beat the accuracy.
I know my leadscrew config is simpler, cheaper, and easier to maintain. What I would appreciate are other opinions on pros and cons of dual screw vs. quad belt (or tri/quad screw which I could also move to for the same or less cost since I already have two screws). I certainly can't envision any Y movement issues from gantry mass with the leadscrews, and I am fairly confident that the wheels will adequately constrain any heaving or dipping from X axis movement - especially since, as in the case of the Y axis, movement is along the CG. And, with the weight of the Z axis, I don't expect backlash to be an issue. If I am overlooking any potential X, Y, or Z artifact issues that may be better addressed by a quad belt arrangement, I may still consider it - I'm just not ready to shell out $100+ and add considerable complexity to my build unless I have a clear understanding of what it will buy me - it looks nice though. Thoughts?
Sorry - https://www.sparkfun.com/ http://www.thingiverse.com/thing:707392 "Preliminary BOM (sparkfun), subject to change: COM-08375 Capacitor Ceramic 0.1uF 4 $1.00 COM-09590 LED - Basic Red 5mm 1 $0.70 COM-09456 Op-Amp (Thru-Hole) - LM358 2 $1.90 COM-09806 Trimpot 10K with Knob 1 $1.90 SEN-10293 Piezo Element 5 $7.50 PRT-12043 Breadboard - Mini Modular (White) 1 $3.95 Some resistors"
Ah, got it. Yeah, I had heard about the piezo sensors - and this may be something I'll see if I can incorporate. Also: The Piezo element is similar to a load cell device, which reports voltage changes on pressures applied. I wonder if I can get a more accurate, but not much more expensive load cell instead.
Modeled a dimensionally-accurate GT2 Belt Loop with a center distance of 523mm. I used a rather nice OpenSCAD library that could generate belt lengths and circles.
Since we're ultimately looking for 1's and o's (is my hot end touching the build plate?), the primary use of the piezo here is for it's sensitivity not it's accuracy. Though with your moving Z plate that could work against you unless you account for it in designing the interface to your Z max input. A sensitive instrument that will trigger at the slightest touch that doesn't produce a false positive is all that is needed. It will be interesting to see if you find an easier to implement load cell device.
Designed a simple 2-piece block clamp for bolting the belt to the side of the Z gantry. The thinner block on the inside of the belt has a GT2 tooth pattern to interface with the belt. The thicker block have raised wedges that fit into the V-Slots, with through-holes for clamping with bolts and t-nuts.
The MIC 6 cast and ground aluminum plate arrived! The top and bottom surfaces are ground flat - this is the stuff that they make tooling plates for in CNC machinery, so the plates are cast and ground so that they're stress relieved and they won't warp. The flatness tolerance on this thickness (1/4") is 0.015", or about 0.38mm - however when you consider that tolerance is over an area as large as this one is (20x16") it's still pretty darn flat. You can see the grinding pattern in the pictures - but it's smooth and shiny to the touch. The plate was CNC saw cut to 20"x16", and I can say that it's exactly on the mark.
I gotta say - this PEI sheet is the best build surface I've ever printed on. I printed out this tall and thin lithograph with ABS, and a 3mm brim - and it stayed on for the entire 4-hour print. Popped off very easily, used a plastic card to get under the brim. I set the bed temp to 115, and it was about 100 on the surface of the PEI. This printed in an open enclosure, and it came out great!
Did you trim a piece of of your large sheet for your other printer? What is the build plate size and what is the printer model? Did you use 3M double sided tape to attach it to your heated bed?
Yes, when I cut the large piece of PEI for the big 16*20 plate, I had a strip that's 8" wide x 24" long, so I cut a piece 8"x8" to fit my current printer. The printer is an i3, with a MK2 heat bed and a piece of 4mm borosilicate glass. I used a roll of 10mm wide 3M phone -repair tape I had and covered the glass in strips. It's not the super strength tape that's mentioned in the wiki, but it seems to work well.
Picked up this metric drill tap set today at Harbor Freight for about $11. If it looks identical to the one that OB sells, it's because it is... Also found the best way to measure V-Slot - stick the ruler in the slot! That makes sure it's parallel to the length of the rail for better accuracy. This yardstick/meterstick is aluminum and only about 2mm thick, so it fits in there at an angle perfectly.