So, I was thinking to myself... what if I used the longest closed-loop GT2 belt that RobotDigg had to offer? That would be the 1524mm-long 762 Tooth GT2 belt: http://www.robotdigg.com/product/160/1524mm-long-762-tooth-6mm-wide-2gt-endless-belt It resulted in a vertical build space of about 650 mm! I figure I might as well do it this way - the springs are long enough. I also upgraded the rods to 10mm diameter, with 10mm KFL000 pillow block bearings. The vertical V-slot supports would need to be cut to about 838 mm long - which is fine since I already have 1000mm-long lengths.
Designed an adapter part to mount a 5015S blower fan to the back of the hot end carriage. The fan gets screwed to the plastic part (the white piece) with 20mm M4 screws, or some other coarse-thread screw that's about 4mm in diameter. And then the adapter plate just snaps on to the back of the gantry plate with press-fit snap pegs. I'm still working on an air duct to direct the air from the cooling fan to just under the extruders.
Thanks - the pegs printed nicely in ABS, flexible enough to be squeezed without snapping. Don't have a plate yet to test the fit, but I'm sure it will be fine. The widest part of the pegs comes out to 5.2 mm.
Managed to get a Machinekit / LinuxCNC image running on my BeagleBone Black with the CRAMPS cape... Even though they have a BBB/Cramps configuration pre-loaded, it will take some work to customize it for CoreXY on the X/Y axis. Also, I've been contemplating two different methods of homing for the Z axis - with dual motors, it's possible to configure it with two endstops in a gantry configuration, so that each end of the Z gantry homes to two independant switches - a form of auto-leveling, so to speak. The other method is the Z bed probing with the hot end and piezo sensors, like we discussed earlier. I'm not entirely sure if it's an and/or scenario - possibly both can be used, maybe. There's some logic in Machinekit / LinuxCNC for gantry homing, so I'll have to check that out...
That's great news! I'm sure you'll figure out how to enable core xy kinematics. Check out this thread: http://emc-users.narkive.com/pWFw1zcE/corexy-kins-and-the-beagleboneblack-with-machinekit Though dual Z leveling sounds intriguing, I would avoid it on a couple of fronts. Foremost, though minutely on small scale, a cantilevered build plate would cause each side to move inward, stretching your belts. Secondly, it adds unnecessary complexity. Z bed probing w/piezo sensors will fully address leveling issues all by itself and not only address cantilever issues but also plate flatness issues as well. Best of luck!
Also love the snap-fit solution. I'd be happy to test it out on my plate - could you upload the skp or stl? I have a different fan/duct mount in mind for mine (integrated w/hot end) as I plan to use the other side for additional hot ends (for future quad printing or a direct drive setup). Snap pegs might work for a quick release on my hot-end mount but I would like to try it out first.
Sorry, started a new job about a month ago and haven't had time recently. I will probably catch up with it in a few weeks, and maybe order some parts so I can start building the frame.
np, i will keep an eye on it as the local makerspace is looking to build about the same as you but just with 600*600*600 build volume instead... insane yes but hey there might be a challange or 2 in this :-D
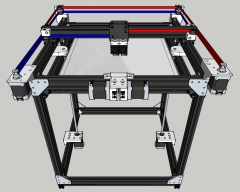
Resurrecting an old/dead build thread, now that I have both time and money to actually do something about it. Core XY on top, and 4 x Openbuilds 8mm Lead Screws for the Z axis. I've found that the Nema 17 motor plate fits perfectly in the middle of the X/Y carriage, so it should work pretty well with one of the new E3D Titan Aero geared extruders - either with a v6 head, or a Volcano.. One aspect I'm trying to stick with this build is NO printed parts in the mechanics - I don't have a functional printer right now, so printing parts is out.
I really like the design of your printer, I'm currently working on a design similar to yours but yours has inspired me to change my idea. thanks, it really is a nice looking machine.