
HULK-XY (Fixed Build Plate, C-Beam, CoreXY)
Discussion in '3D printers' started by Adam Filipowicz, Sep 21, 2015.
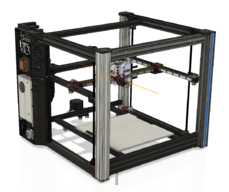
TITANXY (Fixed Build Plate, Quad Z Screw, CoreXY)
Discussion in '3D printers' started by Adam Filipowicz, Sep 21, 2015.
Super Rigid CoreXY 3D Printer
Page 1 of 6
Page 1 of 6