
Vertex CNC - 1000mm x 750mm C Beam
Discussion in 'CNC Mills/Routers' started by EvanBruner, Jul 26, 2016.
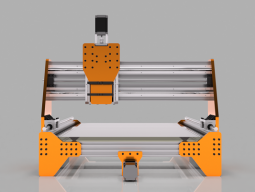
Vertek CNC - 1000mm x 750mm Linear Rail on C Beam
Discussion in 'CNC Mills/Routers' started by EvanBruner, Jul 26, 2016.
C beam gantry with steel guide rails!