I had an epiphany last night... My model now allows for 400mm of travel in X/Y/Z (Y may be a few mm short). All I had to do was invert the Z steppers and all of the holes lined up using standard brackets (though I did have to move the upper rail in a bit). This also let me change the lower side rails to doubles instead of triples. This also allows more freedom in the bottom space for mounting the power supply, control board, etc. I plan on mounting the whole unit on rubber feet so I will be getting at least another 1/2 inch of Z space (which I think I need for the PS) - If I need the space for electronics, I can change it to triples all around. I also changed the mount plates for both the main and middle carriage to simple 3 hole joining plates. Adding double hole tee nuts to mount them should keep them from moving without issue. Anyone see any gotcha's?
I wonder if the acceleration of the X/Y movements could cause z-wobble? I would think if the z carriages are tensioned well it'll be ok?
Yes, that is my greatest concern and why I did my best with the CG and lengthened the moment arm of the main gantry wheels. I had originally started with a design with 4 Z leadscrews but didn't like the added complexity of another belt/pulley assembly under the chassis. I figured I would test it first and if it didn't pass muster, then I have already thought of a different way to go to four leadscrews (but would like to save $60-70 if I can - I'm already at about an $1,100 estimate for the build). If someone can state with authority that it absolutely won't work without going to four leadscrews let me know....
I think it'll depend more on the play in the z-axis carriages. If the towers are rigid, and the wheels are tensioned well to the towers , you should be fine with two screws, but won't know until tested. I appreciate your research if you decide to go through with building!
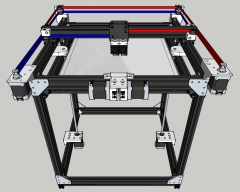
Exactly. Though I'm fairly confident that the rigidity will be sufficient for the mass it will need to constrain. And I am going to proceed with building. I'm completing my BOM right now. If needed in the future, adding two additional leadscrews would be a simple mod. As you can see, it is easy to enclose for a heat controlled space if desired. I think I am going to mount my control and display electronics on the top front (now the back in the pic above; I am going to switch the hot ends around - and of course the front can be whichever face you desire). This way my control line lengths to the steppers, etc., will be shortened, reducing wire resistance (it is easier to run one larger gauge wire up to the control board). I will use a DC/DC relay for the heat bed to keep the high power line lengths to a minimum (also much simpler with a fixed bed). I moved the X/Y steppers to the opposite side, improving belt placement and reducing belt length (though requiring two more pulleys). I also found that cutting a universal OB v-slot gantry plate in two will yield a gantry plate with the holes lining up perfectly for OB mini wheels.
Here's a shot of the other side (doesn't reflect new belt routing around the pulleys) with a cut-in-half V-slot plate which makes a perfect gantry plate with room at top for bowden tube and wiring attachment/relief.
That looks like a great implementation for the core x/y! I have been shying away from this type of build because of the belt overlap and never thought to move the motors to the other side. I am highly considering this now. I do have a couple questions if you don't mind. The first is for the firmware does this need a customized solution for the core x/y or can you use say marlin? My next question is as to what the power requirements for this size heat bed? Might I suggest starting your own build page I would definitely like to keep tabs on this and possibly "borrow" some of your ideas. Thank you in advance.
Thank you! I keep thinking about what if's (I just may invert the belt assembly to gain more Z height - need to play with it again)... This should work with any core x/y capable control software. Marlin is core x/y configurable. A 360W heater should heat a 400mm x 400mm aluminum spreader plate and glass bed to 60C in 1 minute and 100C in about 4 minutes (higher for shorter heat-up time/lower for longer heat-up time - your choice). I didn't mean to hijack this thread, I'll see if I can ask someone to move my posts to a new thread....
Good night Giuliano That´s a great project. I am looking for XY Extended Idler part STLs in the build files. Have you removed it ? Thanks Reinaldo
Forking to a new thread to not interfere with Guiliano's build: http://www.openbuilds.com/threads/h-bot-corexy-cube-with-fixed-build-plate.1528/
Looking over more info on the H-Bots found this great resource that may help. http://www.multimechatronics.com/build_a_h-bot.php H-Bots are cool!
Guiliano, Did you see my mini (20mm) v-slot gantry plate configuration? Have you worked on a similar floating carriage adaptation? Are you still set on the replicape? Did you see this review (www.youtube.com/results?search_query=replicape)? I went ahead with the Fastbot BBP(1S) kickstarter. I had also looked at the replicape but if the Fastbot hadn't come out I think I would have gone with a CRAMPS/BBB (which you could probably still do and use your manga screen). Have you looked at the CRAMPS (http://reprap.org/wiki/CRAMPS, http://blog.machinekit.io/, http://pico-systems.com/osc2.5/catalog/index.php?cPath=5)? Looks like a pretty sweet setup with machinekit... Please have another look at my current config and let me know if you see any issues or have come up with a better idea for yours. I'm getting ready to freeze my BOM and order parts to begin construction... Thanks!!!
I'm not sure if I've seen your mini v-slot gantry plate - if it's not in this thread, a link would be appreciated. Or if it is, a post number. I'm not 100% set on the Replicape hardware yet, as their initial release was a bit expensive - and the less expensive revision "B" boards are supposedly in progress. The Replicape Redeem software does seem to be the limiting factor right now - though I've been monitoring their Bitbucket repo, and there's been lots of recent activity, so maybe that will improve. The CRAMPS board does look interesting - I like the support for LinuxCNC, so I may have to take a look at it. I'm assuming that the CRAMPS can use the DRV8255 pololu shields. I haven't been able to do much work on this project recently, as the tax man has called and I'll be in a hole for a few months...
I believe they're listed as just the "XY Idler - Right" and "XY Idler - Left" STL's - they're the (extended) pieces that go in the back corners. They're large pieces, and they tended to lift and curve quite a bit when I printed them in ABS... I need to try it in PLA with a fan so they don't shrink. I'm also uploading a newer version of the Sketchup file that I've been using - the gantry plate and bed area aren't final, they're some ideas I was playing with.
Also: I see what you mean, with the use of the new 20mm gantry plates. That's an interesting idea - I'll see if I can incorporate the new 20mm plates into my design. I was having issues with using the much larger universal gantry plate - it just took up too much space. I may try to use two sets of the 20mm gantry plates, stacked horizontally, with the hot-end underneath. Some new ideas to play with.
So, this is an alternate carriage that I've mocked up, using the newer 20mm gantry plates - thanks to TomH for the idea. Needs some work to be done to integrate the idler pulleys at each end, but it has some potential. Vertical X-carriage plate, mounting surface area on the front and back, with the slots for belts offset by the standard 20mm spacing... I'm thinking that the single 20mm v-slot bar could spin/twist on the central screw hole, but some brackets should take care of that.
In your last gantry depiction (in post 9445) your side rails were vertical whereas this H bar rail appears to require horizontal side rails or 20x20's to ride on. Did you change your gantry side rails as well?
Yeah, I plan to turn the side rails onto the horizontal orientation, just haven't modeled that part yet.
The new gantry and side rails are more likely to be like this. The side rails are rotated horizontally, with the gantry wheels riding along the inner track. I'm modeling this with the OpenBuilds Nema17 mounting plates for the X/Y motors in the front - the plate on the right will be raised up by 20mm with a spacer block of some kind, possibly printed.
Your belt routing seems problematic in this configuration. Didn't your printed stepper mounts work as is? Couldn't you do the same thing by mounting the single 20x20 gantry rail like you did previously and modify your pulley mounts while utilizing your originally printed stepper mounts? A single pulley mount could then be used to hold both front and rear pulleys and you wouldn't need to cut the gantry rail.
Yeah, I realized that after I started lining things up. The alternative I'm going with now is with the top beams laid flat in a square, with the X/Y motors mounted off of the front bar - one motor face up, one motor face down. The two belt paths won't intersect - one on top of the bars, one below the bars, and they should line up with the belt slots in the gantry plate. Had to move the Z motor assemblies to the outside of the frame, too... I'm sure that will bring further changes down the road. I really like the new smaller gantry plate concept - the universal one is just too big without having to hack it down to size. Also, all of the v-slot stock I got was in 1500mm lengths, so I'm not too worried about cutting the rest down to odd sizes. I may try to accommodate a 20x20 gantry rail as-is at 500mm long, but of course that pushes everything else around it to longer lengths...
Placed the idler pulleys required to make the top half of the CoreXY belt loops, and sketched out the path. The belt will be attached to the belt loops at the top of the carriage plates, one end on each side. The path for the other motor should be similar, just flipped around upside down.. possibly some path clearance issues going around the frame.. The pulley assemblies on the top are bolted right on top of the frame, with about 4mm of spacing above the V-Slot.
And here's the belt layout for the underside, viewed with the build plate hidden. I rotated the vertical beams 90 degrees, so the stepper needs an additional pulley to guide the belt around the vertical V-slot beam in the lower left corner. The little white rectangles holding the gantry idler pulleys will just be simple pieces of 20x40mm aluminum brackets... or possibly these 2-hole joining strip plates: http://openbuildspartstore.com/2-hole-joining-strip-plate/
Seems like you are giving up a lot of X travel in this config. Also, make sure you do your very best to minimize any belt offset from pulley to pulley or pulley to gantry as this will (however minutely) change the distance your belt travels across the span and vary the tension on your belt. Offset is fine between fixed pulleys - just not ones that move in a way that changes their offset angle as a function of their travel...
Decided to go with the CRAMPS board for the BeagleBone Black, with LinuxCNC. Ordered one, so it'll be here in a few days - not that I'll need it immediately at this stage. I'll continue to tweak the layout - if I have to go beyond 500mm lengths, so be-it.
Let me know your thoughts about the CRAMPS after you fire it up with a BBB and check it out... I'm now waiting for the arrival of my BBP 1S: https://www.kickstarter.com/projects/1177488680/bbp-making-your-3d-printer-faster/description I'm hoping that it comes in early vs late June. I have quite a lot of work to do before then so I probably won't be ready much before it arrives anyway. It is nearly identical in specs to a CRAMPS/BBB or Replicape/BBB but as in everything the proof will be in the pudding - the LCD and expansion board are still in the works though so it will be wait and see if servo support ensues. If the BBP doesn't deliver on its promises, I may just get this since the CRAMPS doesn't have servo outputs: http://www.ebay.com/itm/RAMPS-FD-Du...148?pt=LH_DefaultDomain_0&hash=item339a915634 I'm really hoping the BBP works out though because it looks like most of the RAMPS-FD boards out there are still v1 and I'd rather avoid the requirement to rework the board to make the v2 changes...(http://forums.reprap.org/read.php?219,424146) UPDATE: I found out that the supplier who said they were selling v1.2 boards [GEETECH] were actually v1.A boards - explains the cheap price - really hoping my BBP1S works as advertised...
New plan: Architect the frame for the build volume I want (400mx3) rather than arbitrary 500mm V-Slot lengths. This required that I make things.... bigger. New plan makes the frame wider and deeper, to allow both sides of the print head carriage to reach all 400mm cubed space - which is what the white box is - 400x400x400mm. Still re-working the Z-plate assembly to the larger frame... You can't see it from this angle, but there's a second E3D Cyclops/Chimera block on the other side of the carriage. The V-Slot I have is in 1000mm lengths, so I'll have to order some more... I'm sure I'll be able to re-use the cut-offs.
One thing I'm thinking of is to ditch the threaded Z-rods (I'll use them for something else..) and instead use a belt system on each side of the Z plate axis to raise and lower each corner. The stepper motors I have are beefy enough to hold the weight, I think - and with the CRAMPS board, I have enough to drive two Z steppers slaved together, plus 2 for X/Y and 2 for dual extruders. The only problem I have to figure out here is the X where the belts cross over - I could put an idler pulley somewhere to twist the belts so that they don't hit each other, but I'm not sure where.
I would be afraid of belt stretching effects introducing Z height error. However, I would avoid belt crossover regardless; I see no way of doing this that wouldn't require some belt offset that would introduce Z height variation as a matter of height (however small) even without belt elongation effects. If you are set on testing the efficacy of belts, I would suggest you use separate belts for each side with the stepper in the center. This would increase overall belt strength/reduce elongation potential and obviate the need to cross belts, though it would require a couple of extra idlers.
I've read of others using belt systems for Z axis without issues, even reports of it eliminating Z-banding. I think I'll go with this arrangement instead - 8mm drill rod shafts at the top and bottom with toothed pulleys, with a short closed-loop belt being driven by the stepper motor underneath. Duplicated on the other side to lift the other end of the plate..